Muzzle blast Model
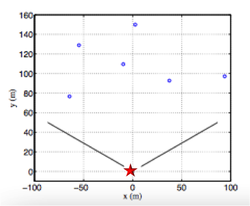
This report focuses on sniper localization using a network of acoustic sensors to detect the muzzle blast of a gunshot. A maximum likelihood method approach was employed to estimate the shooter position. This method relies on time-difference of arrival (TDOA) measurements from multiple single-sensor nodes, as shown in the figure to the left.
The first step for modeling the muzzle blast model involves the Time of Arrival (TOA), for the ith sensor (out of a total of N sensors) and the mth measurement (out of a total of m measurements). Next, the time-difference of arrival is calculated, using sensor 1 as a reference, for time synchronization purposes, and calculates the difference between the TOA measurements of the various sensors, which produces a total of N-1 TDOA measurements.
Sensor Network [3]
The first step for modeling the muzzle blast model involves the Time of Arrival (TOA), for the ith sensor (out of a total of N sensors) and the mth measurement (out of a total of m measurements). Next, the time-difference of arrival is calculated, using sensor 1 as a reference, for time synchronization purposes, and calculates the difference between the TOA measurements of the various sensors, which produces a total of N-1 TDOA measurements.
Sensor Network [3]

From the TDOA measurements, the maximum likelihood method was used to estimate
the position of the sniper [3].
the position of the sniper [3].